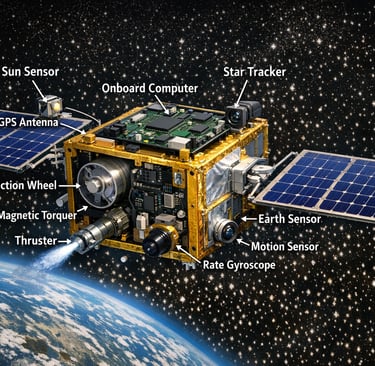
ActiveCore Labs software serves as the foundational integration layer that bridges the gap between physical hardware and intelligent mission logic. By seamlessly orchestrating the interaction between high-performance actuators and diverse sensor arrays, the platform enables precise control and real-time environmental awareness. The software actively collects raw data from sensors and reports it to higher application layers, providing the essential telemetry required for motion planning and Guidance, Navigation, and Control (GNC) operations.
To maintain mission reliability, the architecture enforces strict data integrity protocols across all communication channels to ensure that every command and reading is accurate and verifiable. It further optimizes system performance by offloading heavy computational tasks from the primary CPU to specialized hardware acceleration boards. This distributed processing model ensures that intensive mathematical functions, such as image processing or complex kinematics, do not bottleneck the core system.
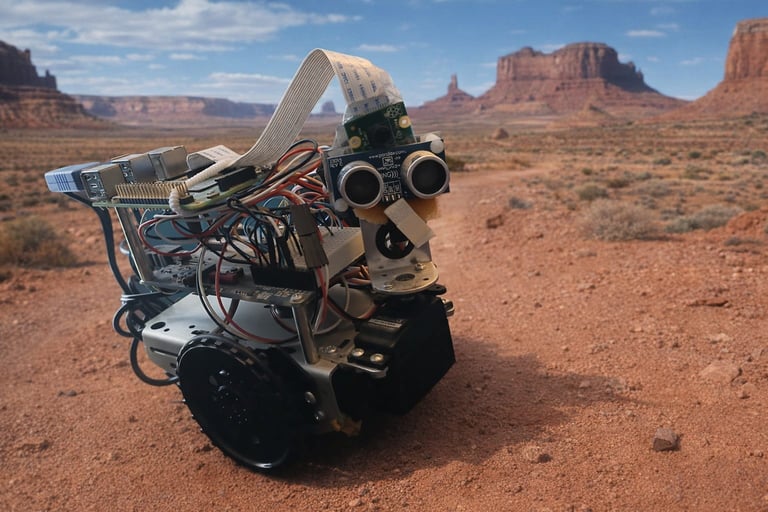
By enabling high-level onboard autonomy, our solution significantly reduces the necessity for constant ground-side intervention during complex maneuvers. This shift to localized intelligence ensures that systems can react to dynamic environments instantaneously, offloading the cognitive and operational burden from remote mission control. By balancing high-speed data acquisition with hardware-accelerated computation, the software creates a robust environment for autonomous robots and spacecraft. The result is a highly responsive system capable of executing sophisticated maneuvers while maintaining low latency in decision-making. Ultimately, ActiveCore Labs empowers developers to focus on high-level autonomy while the software handles the complexities of hardware synchronization and computational efficiency.
Autonomous Systems
Hardware-Accelerated Integration for Mission-Critical Autonomy